



摘要:本文旨在分析开环霍尔电流传感器在工业驱动应用中的技术特性与选型逻辑。以典型的高性能开环传感器为例,探讨其在带宽、响应时间、精度及成本之间的平衡,为通用伺服、变频器及电源系统的工程师提供客观的选型参考。
一、引言:工业驱动对电流反馈的真实需求
在工业自动化领域,电流反馈是电机控制(FOC、矢量控制)的核心环节。长期以来,工程界存在一种误区,认为“只有闭环霍尔传感器才能满足伺服控制需求”。然而,随着ASIC(专用集成电路)技术和磁芯材料的进步,现代高性能开环霍尔传感器的性能边界已大幅拓展。
对于占据市场绝大多数的通用伺服、变频器、UPS及新能源电源应用,盲目追求超高带宽(>400kHz)和极致精度(<0.3%)往往意味着成本的浪费和系统噪声的增加。如何在满足动态响应(带宽>200kHz,响应<5μs)的前提下,实现成本、体积与可靠性的最优解,是工程设计的关键。
本文将基于主流高性能开环传感器的技术参数,分析其适用场景与局限性。
二、技术原理与关键参数解析
2.1 开环与闭环的本质区别
闭环(磁平衡式):通过副边线圈产生反向磁场抵消原边磁场,使磁芯工作在零磁通状态。
优点:线性度极高,温漂小,无磁饱和风险。
缺点:电路复杂,成本高,功耗大,体积较大。
开环(直测式):直接测量磁芯气隙中的磁感应强度。
传统痛点:易受磁芯非线性、温度漂移影响,带宽较低。
现代突破:通过高线性度纳米晶/非晶磁芯 + 高精度温度补偿ASIC,现代开环传感器在250kHz带宽内的线性度和温漂已大幅改善,足以满足中高频控制需求。
2.2 关键性能指标分析(以典型高性能开环方案为例)
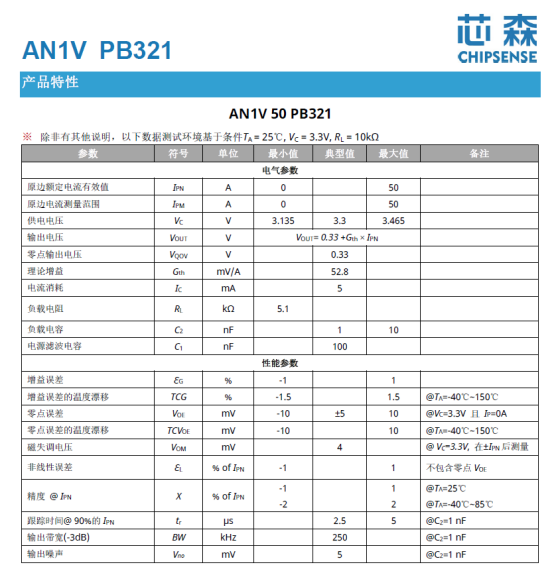
基于当前市场主流的高性能开环传感器(如AN1V系列规格),其核心参数如下:
| 参数项 | 典型数值 | 工程意义 |
| 带宽 (-3dB) | 250 kHz | 能够准确复现20kHz-40kHz PWM载波下的电流波形,满足大多数矢量控制需求。 |
| 响应时间 ( tr ) | 2.5 μs (典型) | 决定了电流环的控制延迟。2.5μs的延迟对应理论带宽裕量充足,不会成为常规伺服系统的瓶颈。 |
| 精度 | ±1% (@25°C) | 对于风机、水泵及通用机械手,±1%的精度完全满足转矩控制要求。 |
| 零点漂移 | ±5 mV | 直接影响小电流下的控制精度。现代ASIC将漂移控制在毫伏级,提升了低速性能。 |
| 绝缘耐压 | 4.8 kV | 满足工业级CAT III环境的安全隔离要求。 |
| 供电电压 | 3.3 V / 5 V | 兼容主流DSP/MCU电平,简化外围电路。 |
2.3 带宽与延迟的理论计算
根据控制理论,电流环的可用带宽受限于总延迟( Td)。对于响应时间为2.5μs的传感器,其引入的相位滞后在20kHz基波频率下极小。
Phase Lag≈arctan(2π⋅f⋅Td)
当 f=20kHz, Td≈2.5μs 时:
Phase Lag≈arctan(2⋅3.14⋅20000⋅2.5×10−6)≈arctan(0.314)≈17.4∘
注:实际系统中, Td还包含ADC采样、计算延迟等。传感器本身的2.5μs快速响应为系统留出了宝贵的相位裕度。若使用传统开环传感器( tr>7μs),相位滞后将显著增加,可能导致高速下系统振荡。
三、应用场景与选型策略
3.1 适用场景分析
高性能开环传感器(带宽~250kHz)主要适用于以下场景:
通用变频器:风机、水泵、压缩机。
需求:成本低,可靠性高,对动态响应要求不高(带宽>50kHz即可),但现代矢量控制需要更好的线性度。
通用伺服驱动器:包装、纺织、物流设备。
需求:需要较快的响应(<5μs)以支持速度环和位置环的快速调节,但对极致精度的容忍度高于精密机床。
开关电源与UPS:
需求:双向电流检测,高绝缘,中等带宽。
新能源汽车辅助系统:
需求:OBC、DC-DC变换器中的电流监测。
3.2 不适用场景(需选用闭环传感器)
以下场景建议仍采用闭环霍尔传感器或磁通门传感器:
高精度精密机床/机器人:要求精度<0.5%,零超调,极低温漂。
高频注入控制:载波频率>50kHz,或需要提取高频信号特征的控制算法。
极端温度环境:环境温度长期超过85°C且对精度有严格要求(开环磁芯受温度影响相对较大)。
强直流偏置场合:开环传感器在强直流偏置下磁芯容易进入非线性区,而闭环传感器能更好地保持线性。
3.3 选型决策树
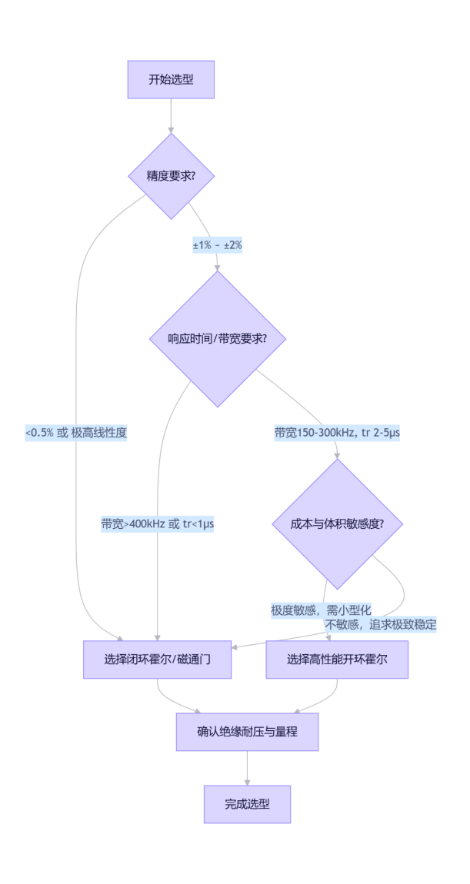
四、工程应用中的注意事项
在实际电路设计与应用中,即使选择了高性能开环传感器,仍需注意以下细节以确保系统性能:
4.1 负载电容匹配
开环传感器的输出级通常为运放结构,对负载电容敏感。
建议:参考规格书,通常建议在输出端并联 1nF - 10nF 的电容以滤除高频噪声。
风险:电容过大(>100nF)会形成低通滤波器,人为降低系统带宽,导致相位滞后增加,甚至引发振荡。
4.2 安装方向与剩磁
方向性:开环传感器具有明确的电流方向(Pin In -> Pin Out)。安装反向会导致输出电压逻辑反转,引发控制系统故障。
剩磁影响:虽然现代磁芯矫顽力低,但在经历极大过流冲击后,可能会产生微量剩磁,导致零点偏移。设计时应预留软件零点校准功能,或在硬件上设计消磁电路(如需)。
4.3 PCB布局与抗干扰
走线:传感器输出信号为模拟小信号,应远离PWM功率走线和变压器等高干扰源。
接地:采用单点接地,避免地环路引入噪声。
供电去耦:在传感器电源引脚附近放置10μF电解电容和0.1μF陶瓷电容,保证供电纯净。
4.4 温度漂移补偿
尽管内置了温度补偿,但在宽温范围(-40°C ~ 85°C)内,零点漂移和灵敏度漂移依然存在。
对策:在高精度要求的通用伺服中,建议在MCU软件中建立温度补偿查表法,利用NTC测温结果对电流读数进行修正。
五、总结
随着半导体工艺和磁性材料的发展,高性能开环霍尔电流传感器(带宽250kHz,响应2.5μs,精度±1%)已经成为通用伺服、变频器及电源行业的主流选择。
技术定位:它填补了“低端传统开环”与“高端闭环”之间的空白,提供了最佳的性价比方案。
核心价值:在满足绝大多数工业驱动动态响应需求的同时,显著降低了系统成本、功耗和体积。
选型原则:工程师应根据具体的控制算法带宽需求、精度容忍度及成本预算进行理性选择,而非盲目追求高指标。对于非极端工况,现代开环方案是完全可靠且高效的技术路径。