



概要:
本稿は、産業用ドライブアプリケーションにおけるオープンループ型ホール電流センサの技術的特性と選定ロジックを分析することを目的としています。典型的な高性能オープンループセンサを例に挙げ、帯域幅、応答時間、精度、コストのバランスについて検討し、汎用サーボ、インバータ、電源システムのエンジニアに対して客観的な選定指針を提供します。
産業オートメーション分野において、電流フィードバックはモータ制御(FOC、ベクトル制御)の中核となる环节です。長年、産業界には「サーボ制御の要件を満たせるのはクローズドループ型ホールセンサのみである」という誤解が存在しました。しかし、ASIC(特定用途向け集積回路)技術や磁心材料の進歩により、現代の高性能オープンループ型ホールセンサの性能限界は大幅に拡大しています。
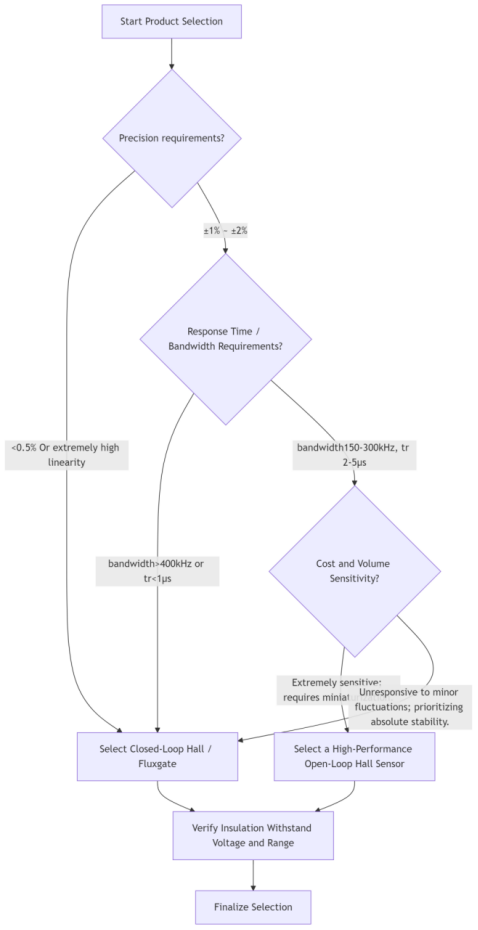
市場の绝大多数を占める汎用サーボ、インバータ、UPS、および新エネルギー電源アプリケーションにおいて、盲目的に超高帯域幅(>400kHz)や極限の精度(<0.3%)を追求することは、しばしばコストの浪費やシステムノイズの増加を意味します。動的応答(帯域幅>200kHz、応答<5μs)を満たす前提の下で、いかにしてコスト、体積、信頼性の最適解を実現するかが、エンジニアリング設計の鍵となります。
本稿では、主流の高性能オープンループセンサの技術パラメータに基づき、その適用シナリオと限界を分析します。
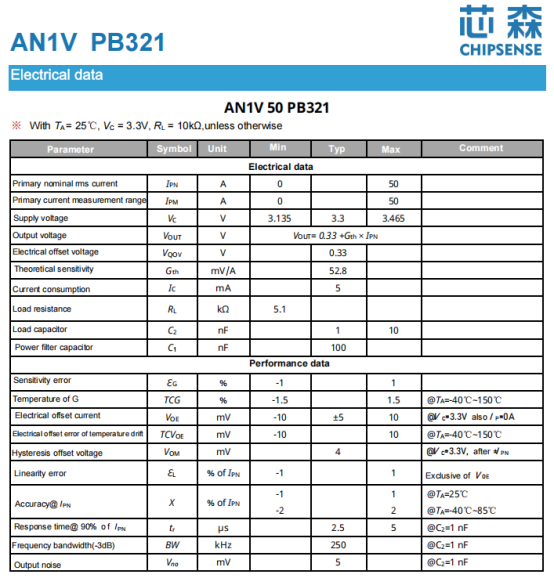
現在の市場主流の高性能オープンループセンサ(例:AN1Vシリーズ仕様など)の核心パラメータは以下の通りです。
| パラメータ項目 | 代表的な数値 | エンジニアリング上の意義 |
|---|---|---|
| 帯域幅 (-3dB) | 250 kHz | 20kHz〜40kHzのPWMキャリア波形下の電流波形を正確に再現でき、ほとんどのベクトル制御のニーズを満たします。 |
| 応答時間 ( trtr ) | 2.5 μs (典型) | 電流ループの制御遅延を決定します。2.5μsの遅延は理論的な帯域幅のマージンが十分であり、通常のサーボシステムのボトルネックにはなりません。 |
| 精度 | ±1% (@25°C) | 送風機、ポンプ、汎用マニピュレータにとって、±1%の精度はトルク制御の要件を完全に満たします。 |
| ゼロ点ドリフト | ±5 mV | 小電流下での制御精度に直接影響します。現代のASICはドリフトをミリボルトレベルに抑制し、低速性能を向上させています。 |
| 絶縁耐圧 | 4.8 kV | 産業用CAT III環境の安全絶縁要件を満たします。 |
| 供給電圧 | 3.3 V / 5 V | 主流のDSP/MCU电平と互換性があり、周辺回路を簡素化します。 |
制御理論によると、電流ループの利用可能帯域幅は総遅延( TdTd )によって制限されます。応答時間が2.5μsのセンサの場合、20kHzの基本波周波数における位相遅れは極めて小さくなります。
Phase Lag≈arctan(2π⋅f⋅Td)Phase Lag≈arctan(2π⋅f⋅Td)
f=20kHzf=20kHz 、 Td≈2.5μsTd≈2.5μs の場合:
Phase Lag≈arctan(2⋅3.14⋅20000⋅2.5×10−6)≈arctan(0.314)≈17.4∘Phase Lag≈arctan(2⋅3.14⋅20000⋅2.5×10−6)≈arctan(0.314)≈17.4∘
注:実際のシステムでは、 TdTd にはADCサンプリングや演算遅延なども含まれます。センサ自体の2.5μsという高速応答は、システムに貴重な位相マージンを残します。従来のオープンループセンサ( tr>7μstr>7μs )を使用した場合、位相遅れが顕著に増加し、高速域でシステムの振動を引き起こす可能性があります。
高性能オープンループセンサ(帯域幅〜250kHz)は、主に以下のシナリオに適しています。
以下のシナリオでは、引き続きクローズドループ型ホールセンサまたはフラックスゲートセンサの採用を推奨します。
実際の回路設計および应用中には、高性能オープンループセンサを選定した場合でも、システム性能を確保するために以下の詳細に注意する必要があります。
オープンループセンサの出力段は通常オペアンプ構造であり、負荷容量に敏感です。
温度補償が内蔵されていても、広温度範囲(-40°C 〜 85°C)内では、ゼロ点ドリフトや感度ドリフトが依然として存在します。
半導体プロセスと磁性材料の発展に伴い、高性能オープンループ型ホール電流センサ(帯域幅250kHz、応答2.5μs、精度±1%)は、汎用サーボ、インバータ、および電源業界における主流の選択となっています。